MVP Matrix
MVP 矩阵即 Model(模型)、View(观察)、Projection(投影)矩阵。
Model
模型矩阵描述的是 3D Point 的仿射变换,包含 Scale(缩放)、Rotate(旋转)、Translate(平移)。
可以按照下面的方式表示: \[ M = Scale \times Rotate \times Translate \]
- 最后进行 Translation 是为了保证前面的操作参考坐标轴不会变化。
- OpenGL 是左乘的,因此编程时计算模型矩阵需要按照 Translate、Rotate、Scale 的顺序进行。
写的具体一点如下: \[ \begin{bmatrix} \hat{x}\\ \hat{y}\\ \hat{z}\\ 0\\ \end{bmatrix}= \begin{bmatrix} a & b & c & t_x\\ d & e & f & t_y\\ g & h & i & t_z\\ 0 & 0 & 0 & 1 \end{bmatrix}\times \begin{bmatrix} x \\ y \\ z \\ 1 \\ \end{bmatrix} \] 之所以用 4 × 4 的矩阵来表示,是为了统一用矩阵乘法。如果用 3 × 3 的矩阵,会导致计算 Translate 变化时,只能用 3 × 3 的矩阵矩阵加法来表示。并且这样可以用来区分点(Point)和向量(Vector)。
- 3D Point \([x,y,z,1]^T\) (w = 1,Translate OK)
- 3D Vector \([x,y,z,0]^T\)(w = 0,No Translate)
- 3D Point + 3D Point(w = 2,Middle Point)
- 3D Point - 3D Point (w = 0,3D Vector)
- 3D Point + 3D Vector(w = 0,3D Point)
- 3D Vector + 3D Vector(w = 0,3D Vector)
define \([x,y,z,w]^T(w \neq 0)\) is the 3D Point \([x/w,y/w,z/w,1]^T\) 。
这种定义叫做齐次坐标(Homogeneous coordinates)。
View
观察矩阵用于将模型投影到摄像机(Camera)上。
一般而言,定义观察矩阵(或者说摄像机状态)需要下面的一些参数:
- Position:摄像机位置 \(P = [x_p,y_p,z_p]^T\)
- Up:摄像机上方 \(U = [x_u,y_u,z_u]^T\)
- LookAt:摄像机观察方向 \(L = [x_l,y_l,z_l]^T\)
- Right:摄像机右方 \(R = L \times U = [x_r, y_r, z_r]^T\)
为了推导出实际的 View 矩阵(记为 \(V\)),假设初始状态如下的 View 矩阵(记为 \(V_0\))的参数如下:
- \(P = [0,0,0]^T\)(原点)
- \(U = [0,1,0]^T\)(正 Y 轴)
- \(L = [0,0,-1]^T\)(负 Z 轴)
- \(R = [1,0,0]\)(正 Z 轴)
注意,对于观察者而言,我们要感受到物体进行了平移旋转之类的操作,需要对 View 矩阵(摄像机)进行相反的操作。要得到实际 View 矩阵,需要进行逆变换\(V \rightarrow V_0\),其操作具体如下:
- Translate
- P:\([x_p,y_p,z_p]^T \rightarrow [0,0,0]^T\)
- Rotate:
- U:\([x_u,y_u,z_u]^T \rightarrow [0,1,0]^T\)
- L:\([x_l,y_l,z_l]^T \rightarrow [0,0,-1]^T\)
- R:\([x_l,y_l,z_l]^T \times [x_u,y_u,z_u]^T = [x_r, y_r, z_r]^T \rightarrow [1,0,0]^T\)
对于 Translate,容易得到 \[ V_T= \begin{bmatrix} 1 & 0 & 0 & -x_p\\ 0 & 1 & 0 & -y_p\\ 0 & 0 & 1 & -z_p\\ 0 & 0 & 0 & 1 \end{bmatrix} \] 对于 Rotate,不方便直接计算,考虑逆向情况:
- R:\([x_l,y_l,z_l]^T \times [x_u,y_u,z_u]^T = [x_r, y_r, z_r]^T \rightarrow [1,0,0]^T\)(X 轴方向)
- U:\([x_u,y_u,z_u]^T \rightarrow [0,1,0]^T\)(Y 轴方向)
- L:\([-x_l,-y_l,-z_l]^T \rightarrow [0,0,1]^T\) (Z 轴方向)
因此有: \[ V_R^{-1}= \begin{bmatrix} x_r & x_u & -x_l & 0\\ y_r & y_u & -y_l & 0\\ z_r & z_u & -z_l & 0\\ 0 & 0 & 0 & 1 \end{bmatrix} \] 注意到旋转矩阵在实际中会使用正交矩阵,即: \[ V_R = (V_R^{-1})^{-1} = (V_R^{-1})^{T}= \begin{bmatrix} x_r & y_r & z_r & 0\\ x_u & y_u & z_u & 0\\ -x_l & -y_l & -z_l & 0\\ 0 & 0 & 0 & 1 \end{bmatrix} \] 因此实际的 View 矩阵为: \[ V = V_R \times V_T = \begin{bmatrix} 1 & 0 & 0 & -x_p\\ 0 & 1 & 0 & -y_p\\ 0 & 0 & 1 & -z_p\\ 0 & 0 & 0 & 1 \end{bmatrix} \times \begin{bmatrix} x_r & y_r & z_r & 0\\ x_u & y_u & z_u & 0\\ -x_l & -y_l & -z_l & 0\\ 0 & 0 & 0 & 1 \end{bmatrix} \]
Projection
Projection (投影)矩阵一般分为 Orthographic Projection(正视投影)和 Perspective Projection (透视投影)。
Orthographic Projection
之前在 Games101 上看到闫令琪老师的定义感觉很清晰:
Map a cuboid \([l,r] \times [b, t] \times [f, n]\) to the canonical cube \([-1, 1]^3\)。
- 这里的是右手系,所以远平面 f 在前面(比如 OpenGL 中的前面一般认为是负 Z 轴,f < n);
要完成正视投影,只需要两步即可:
- Translate \(Centor Point \rightarrow [0,0,0]^T\)
- Scale \([2,2,2]^T\)
可以很容易得到正视投影矩阵为: \[ P = P_O = \begin{bmatrix} \frac{2}{r-l} & 0 & 0 & 0\\ 0 & \frac{2}{t-b} & 0 & 0\\ 0 & 0 & \frac{2}{n-f} & 0\\ 0 & 0 & 0 & 1 \end{bmatrix} \times \begin{bmatrix} 1 & 0 & 0 & -\frac{r+l}{2}\\ 0 & 1 & 0 & -\frac{t+b}{2}\\ 0 & 0 & 1 & -\frac{n+f}{2}\\ 0 & 0 & 0 & 1 \end{bmatrix} \] Perspective Projection
透视投影可以通过挤压远平面 f 来变成正交投影。
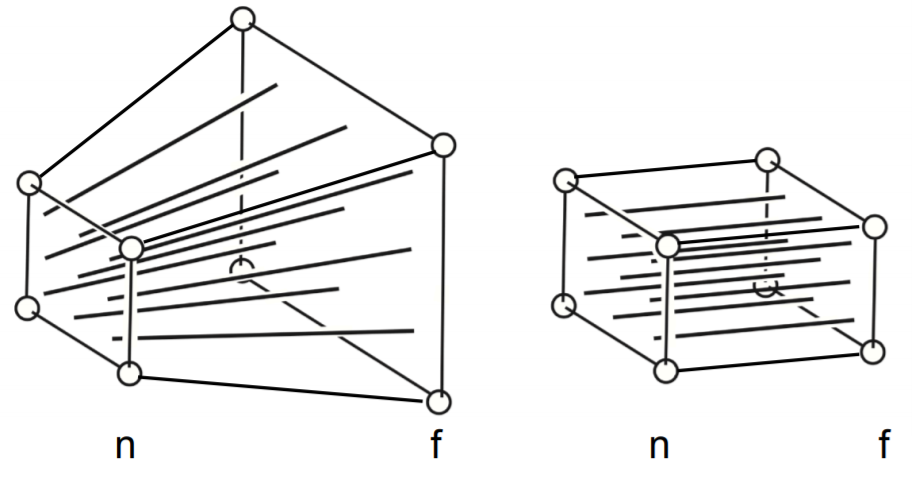
并且有下面的规定:
- 近平面 n 上的点经过挤压后坐标不变。
- 远平面 f 上的中心点挤压后坐标不变。
- 远平面 f 上的点经过挤压后 z 坐标不变(z = f)。
对于某一点 \([x,y,z]^T\),经过变换后变为 \([x',y',z']^T\)。
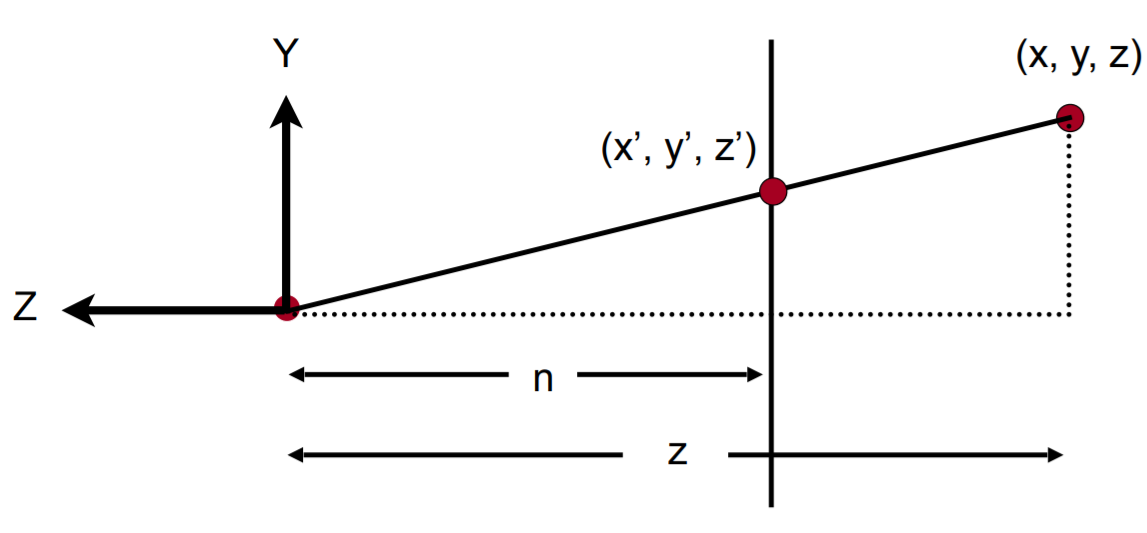
明显有: \[ y'= \frac{n}{z}y \] 类似有: \[ x'= \frac{n}{z}x \] 在齐次坐标中,可以写出下面的式子(3D Point,w = 1): \[ \begin{bmatrix} x\\ y\\ z\\ 1\\ \end{bmatrix} \longrightarrow \begin{bmatrix} \frac{n}{z}x\\ \frac{n}{z}y\\ ?\\ 1\\ \end{bmatrix} = \begin{bmatrix} nx\\ ny\\ ?\\ z\\ \end{bmatrix} \] 记矩阵 \(P_{P\rightarrow O}\) 表示从透视矩阵转为正交矩阵的矩阵: \[ P_{P \rightarrow O} \times \begin{bmatrix} x\\ y\\ z\\ 1\\ \end{bmatrix} = \begin{bmatrix} nx\\ ny\\ ?\\ z\\ \end{bmatrix} \] 由于: \[ P_{P \rightarrow O}[1] \cdot \begin{bmatrix} x\\ y\\ z\\ 1\\ \end{bmatrix} = nx \] 即: \[ P_{P \rightarrow O}[1] = [n, 0, 0, 0] \] 同理: \[ P_{P \rightarrow O}[2] = [0, n, 0, 0] \]
\[ P_{P \rightarrow O}[4] = [0, 0, 1, 0] \]
由于任何近平面 n 上的点坐标不变,因此: \[ \begin{bmatrix} x\\ y\\ n\\ 1\\ \end{bmatrix} \longrightarrow \begin{bmatrix} x\\ y\\ n\\ 1\\ \end{bmatrix} = \begin{bmatrix} nx\\ ny\\ n^2\\ n\\ \end{bmatrix} \] 即: \[ P_{P \rightarrow O}[3] \cdot \begin{bmatrix} x\\ y\\ n\\ 1\\ \end{bmatrix} = n^2 \] 由于和 \(n^2\) 与 \(x、y\) 无关,因此前两项必为 0: \[ [0, 0, a, b] \cdot \begin{bmatrix} x\\ y\\ n\\ 1\\ \end{bmatrix} = n^2 \] 化简有: \[ an + b = n^2 \] 由于任何远平面 f 上的中心点 \([0,0,f]^T\) 坐标不变,因此: \[ \begin{bmatrix} 0\\ 0\\ f\\ 1\\ \end{bmatrix} \longrightarrow \begin{bmatrix} 0\\ 0\\ f\\ 1\\ \end{bmatrix} = \begin{bmatrix} 0\\ 0\\ f^2\\ f\\ \end{bmatrix} \] 即: \[ [0, 0, a, b] \cdot \begin{bmatrix} 0\\ 0\\ f\\ 1\\ \end{bmatrix} = f^2 \] 化简有: \[ af + b = f^2 \] 联立解得: \[ \left\{\begin{matrix} a = n + f\\ b = -nf \end{matrix}\right. \] 因此: \[ P_{P \rightarrow O} = \begin{bmatrix} n & 0 & 0 & 0\\ 0 & n & 0 & 0\\ 0 & 0 & n + f & -nf\\ 0 & 0 & 1 & 0 \end{bmatrix} \] 最终计算出透视投影矩阵为: \[ P_P = P_O \times P_{P \rightarrow O} = \begin{bmatrix} \frac{2}{r-l} & 0 & 0 & 0\\ 0 & \frac{2}{t-b} & 0 & 0\\ 0 & 0 & \frac{2}{n-f} & 0\\ 0 & 0 & 0 & 1 \end{bmatrix} \times \begin{bmatrix} 1 & 0 & 0 & -\frac{r+l}{2}\\ 0 & 1 & 0 & -\frac{t+b}{2}\\ 0 & 0 & 1 & -\frac{n+f}{2}\\ 0 & 0 & 0 & 1 \end{bmatrix} \times \begin{bmatrix} n & 0 & 0 & 0\\ 0 & n & 0 & 0\\ 0 & 0 & n + f & -nf\\ 0 & 0 & 1 & 0 \end{bmatrix} \]


- 本文链接:https://morisa66.github.io/2021/01/14/MVP/
- 版权声明:本博客所有文章除特别声明外,均默认采用 许可协议。